




















В Южно-Уральском государственном университете (ЮУрГУ) создали новый тип БПЛА . Его полет более надежный и предсказуемый в отличие от аналогов.
Вот что говорит один из разработчиков, заведующий кафедрой «Промышленная теплоэнергетика» ЮУрГУ, Константин Осинцев:
Системы управления беспилотными летательными аппаратами существуют, но они не сопряжены с такими элементами, как подкрылки и надкрылки, потому как таких деталей на крыльях беспилотников этого типа до нас пока не делали.
Сейчас разработчики заняты созданием нейронной сети, которая будет нарабатывать базу ошибок при полете БПЛА. Цель проекта — снизить расход топлива или заряда аккумулятора беспилотным летательным аппаратом. Так же обучение нейросетью сделает полет дрона более надежным и управляемым, особенно при сложных погодных условиях. Интеллектуальная система, предварительно обученная на сотнях полетов беспилотника, будет понимать, как действовать в нештатной ситуации в воздухе. Нейросеть собирает данные о различных полетных ситуациях, что позволяет аппарату выбирать оптимальные траектории для экономии энергии. Система управления также способна регулировать углы закрылков и подкрылков, чтобы стабилизировать полет в случае непредвиденных условий. Маневренность беспилотника при порывах ветра увеличится без дополнительного расхода топлива или заряда аккумулятора, поскольку отдельные подвижные детали на его крыльях упростят процесс стабилизации в воздухе.
Уникальность нашего изобретения не только в дополнительных регулирующих элементах, но и в нейросетевой надстройке для электронной системы управления. Мы создаем нейронную сеть, которая будет нарабатывать базу данных по ошибкам аппарата при полете. То есть, когда беспилотник движется без управления человеком, он многократно совершает одни и те же действия; а нейронная сеть в этот момент собирает все погрешности в движении аппарата (отклонение от инерции, дестабилизация при встрече с препятствием или из-за погодных условий и пр.), которые могли возникнуть в каждом предыдущем отработанном действии. Собрав базу таких данных, нейронная сеть сможет прогнозировать и мгновенно ликвидировать всевозможные отклонения при движении БПЛА — говорит разработчик.
Оператору можно будет лишь задать координаты и траекторию полета, полностью придерживаться которой будет помогать новая система. Такой беспилотник сможет автоматически подбирать траекторию для взлета и посадки, а так же, в случае необходимости, планировать оптимальный маршрут, учитывая текущую скорость и метеоусловия, что значительно улучшает его функциональные возможности и безопасность.
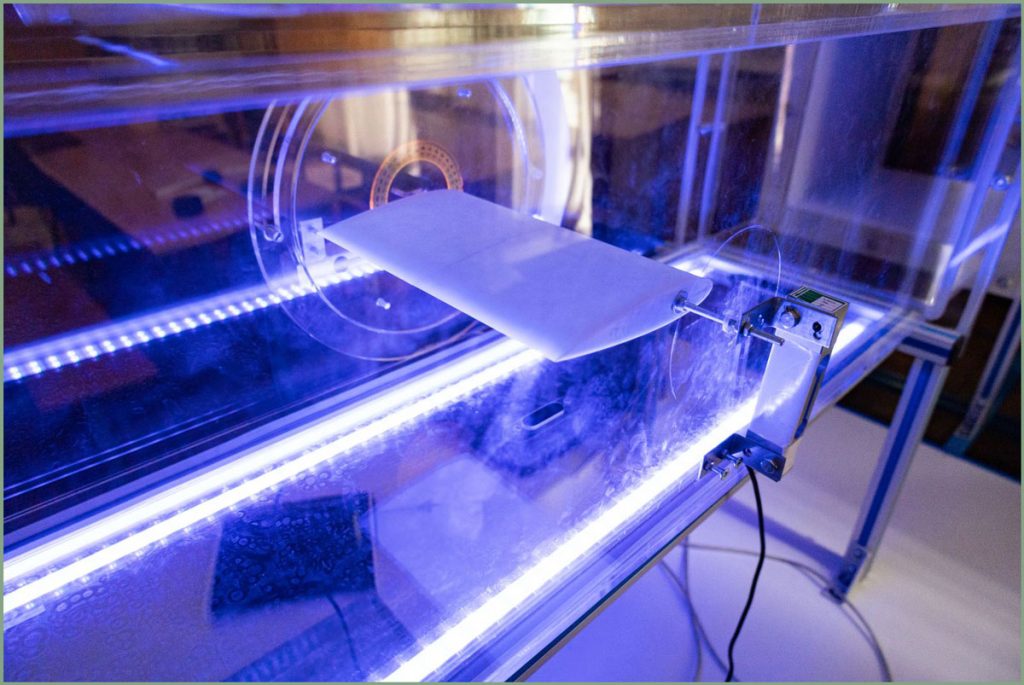
Параллельно с обучением нейросети ученые ЮУрГУ занимаются изготовлением экспериментальных элементов механизации (подкрылок и надкрылок) при помощи 3D-принтера. Исследователи подвергают их разному воздействию потоков воздуха в аэротрубе при разных скоростях и углах наклона.
Универсальное изобретение ученых из Челябинска может применяться также и для защиты лопастей ветроэнергетических установок, которые устанавливаются в некоторых регионах с круглогодичными потоками ветра. Усиленные порывы ветра часто ломают лопасти ветрогенератора, из-за чего падает производительность, потому что приостанавливается выработка энергии на время ремонта. Подвижные элементы подобного рода, установленные на лопастях, будут управляться все той же системой с нейросетью и без привычного участия оператора и смогут успешно помогать противостоять погодным угрозам.