



















МинОбрНауки сообщил, что пензенские учёные разрабатывают безэкипажный подводный аппарат, который найдёт широкое применение в исследованиях океана, поисково-спасательных работах под водой, а также в военном деле. По мнению разработчиков, их аппарат превосходит аналоги по большинству показателей — он более манёвренный, бесшумный и скрытный.
Актуальность подводных беспилотников растет с каждым днем во всём мире. Это можно связать с растущим кругом её применения: роботы помогают изучать природу моря, вести геологические исследования под водой, обследовать и ремонтировать трубопроводы и кабели, проходящие по дну, ну и самое актуальное ,- использование таких беспилотников в военных целях.
Существуют неавтономные подводные аппараты и автономные. Принципы их работы различны. Первые прикреплены к какому-либо судну через кабель, по которому они получают энергию для работы и команды от оператора. У автономных аппаратов есть собственный источник питания и такими устройствами можно управлять без использования проводного канала.
Наиболее подходящими, безопасными и экономичными типами автономных беспилотных устройств для перечисленных выше целей являются подводные аппараты бионического типа, — это означает, что они повторяют природные формы живых существ,- рыб, дельфинов, медуз и т.п. и имеют гибкую конструкцию, сравнимую с прототипом из живой природы.
Такие бионические беспилотники производят значительно меньше шума в процессе движения, обладают большей манёвренностью, меньше воздействуют на окружающую среду, не привлекают внимания. Например они не поднимают грунт со дна, работают не издавая лишние шумы, оставляют менее заметный след на воде, копирующий природный, а что самое важное,- внешне такие беспилотники похожи на подводных обитателей, поэтому их не принимают за чужеродный объект жители морского дна. По всем вышеперечисленным причинам разработчики и инженеры всё чаще предпочитают создавать конструкции бионического типа, а не стандартные привычные торпедообразные цилиндрические варианты.
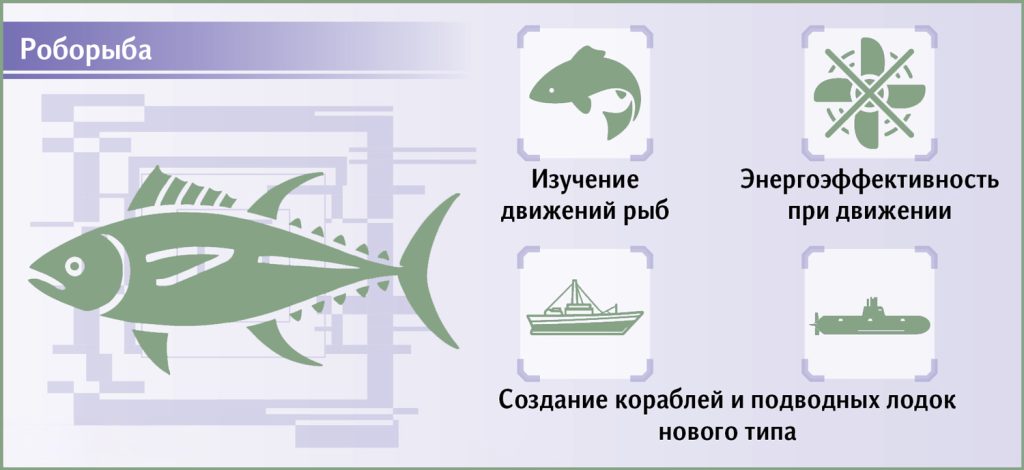
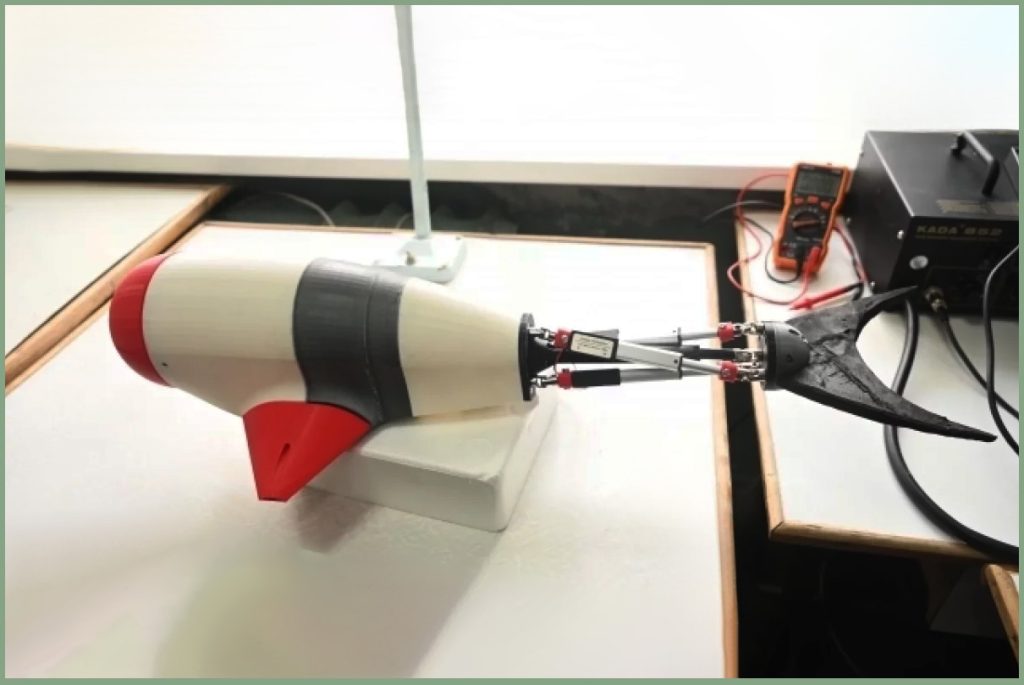
Конструкция и вид, созданного в ПГУ беспилотника основана на механике движения рыб. В воде он перемещается благодаря хвосту и плавникам, сама механика и техника движений взятая за основу подсмотрена у морских обитателей — дельфинов и тунцов.
Это объясняется тем, что тунцы способны преодолевать достаточно большие расстояния, хвост этой рыбы вертикальный большой и мощный , что важно для набора больной скорости и хорошей маневренности. Хвостовой плавник сегментирован и помогает сохранять устойчивость и контроль. Дельфин же был выбран по причине мощности хвостового плавника, он же, в отличие от тунца, расположен горизонтально, благодаря чему достигается плавность передвижения и легкая управляемость.
С помощью соединения техник плавания двух морских обитателей хвост бесприлотника роборыбы меняет свое положение. Поэтому беспилотник максимально универсален и сможет подстраиваться под определённые цели, изменяя технику плавания.
«Подвижная платформа ориентирует хвостовой плавник в соответствии с желаемым движением. Для каких-то целей будет использоваться режим плавания, как у тунца — например, если нужно быстрее проплыть участок. А для задачи маневрирования под водой будет использоваться положение хвостовой части, как у дельфина, — горизонтально», — объясняет автор разработки, аспирант Пензенского государственного университета Илья Урваев.
В носовой части беспилотника установлены видеокамера и гидролокатор. В среднюю часть помещены основные электрокомпоненты и брюшные плавники, позволяющие регулировать крен и повороты, а так же изменять глубину погружения беспилотника. Там же, в средней части, находится комплекс управления беспилотника. Он состоит из нескольких блоков: управления и сбора данных, блока навигации и блока контроля брюшных и хвостового плавника. Внутри установлена флеш-память для записи информации с датчиков и камер.
Разработчики беспилотника исследовали гидродинамическую модель аппарата, поэтому им удалось понять как беспилотная роборыба будет проявлять себя в реальных условиях под водой.
На данный момент создан рабочий макетный образец беспилотника, далее планируется создание реального большого образца в натуральную величину , который будет иметь длину 1,5 м и диаметр 30 см., а масс составит около 20 кг.
Раму-каркас беспилотника планируется изготавливать из из алюминиевого сплава, а внешнюю часть из пластика. Это придаст беспилотнику легкость и маневренность перед более тяжелыми аналогами.
Сейчас тестирование управления беспилотника происходит через проводные каналы, но в дальнейшем управление будет осуществляться обератором с помощью пульта по беспроводной связи.
«Подводный аппарат может найти применение в военной сфере, при проведении разведывательных операций и везде, где нужно погружаться в воду. Это гидрометеорологические и океанологические исследования, поисково-спасательные работы под водой», — говорит разработчик.
Сейчас, параллельно с созданием полноразмерного прототипа разработчики беспилотника ищут способы увеличения энергоемкости, а, значит, дальности работы подводного беспилотника, которая по предварительным расчетам уже составляет несколько десятков километров. Мы будем следить за проектом и очень надеемся, что данная разработка найдет достаточное финансирование и применение в современных условиях.